TDA4856 데이터 시트보기 (PDF) - Philips Electronics
부품명
상세내역
제조사
TDA4856 Datasheet PDF : 58 Pages
| |||
Philips Semiconductors
I2C-bus autosync deflection controller for
PC monitors
Product specification
TDA4856
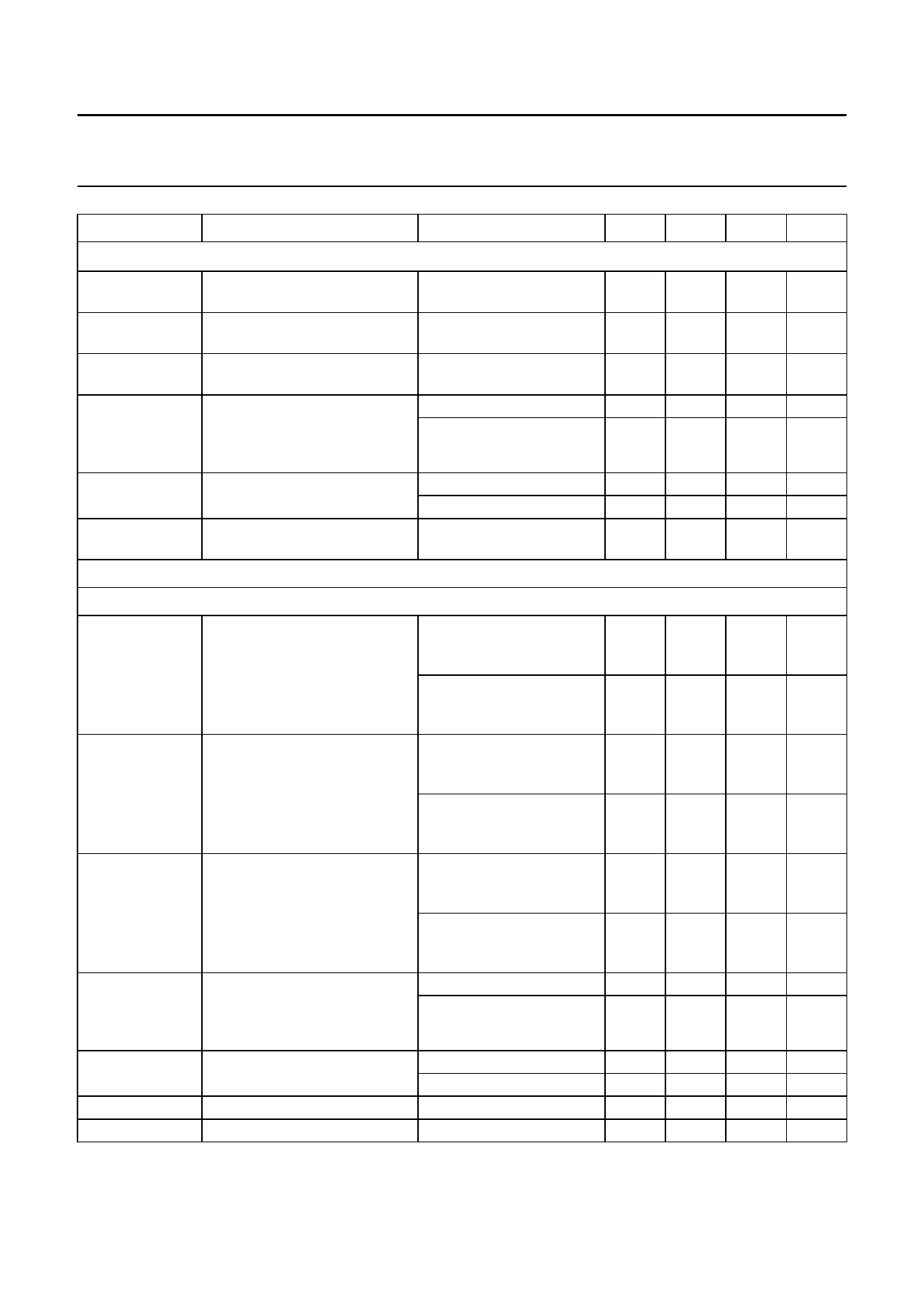
SYMBOL
PARAMETER
CONDITIONS
MIN. TYP. MAX. UNIT
Vertical oscillator (oscillator frequency in application without adjustment of free-running frequency ffr(V))
ffr(V)
free-running frequency
RVREF = 22 kΩ;
40
42
43.3 Hz
CVCAP = 100 nF
fcr(V)
vertical frequency catching
constant amplitude; note 7 50
−
160 Hz
range
VVREF
voltage at reference input for
vertical oscillator
−
3.0
−
V
td(scan)
delay between trigger pulse
and start of ramp at VCAP
(pin 24) (width of vertical
blanking pulse)
control bit VBLK = 0
control bit VBLK = 1
220 260 300 µs
305 350 395 µs
IVAGC
currents of amplitude control
control bit AGCDIS = 0
control bit AGCDIS = 1
±120 ±200 ±300 µA
−
0
−
µA
CVAGC
external capacitor at VAGC
(pin 22)
150 −
220 nF
Differential vertical current outputs
ADJUSTMENT OF VERTICAL SIZE INCLUDING VGA AND EHT COMPENSATION; see Figs 3 to 7
VGAIN
vertical size without VGA
register VGAIN = 0;
−
70
−
%
overscan (referenced to
register VSIZE = 127;
nominal vertical size)
bit VOVSCN = 0; note 8
register VGAIN = 63;
−
100 −
%
register VSIZE = 127;
bit VOVSCN = 0; note 8
VSIZE
vertical size without VGA
register VSIZE = 0;
−
60
−
%
overscan (referenced to
register VGAIN = 63;
nominal vertical size)
bit VOVSCN = 0; note 8
register VSIZE = 127;
−
100 −
%
register VGAIN = 63;
bit VOVSCN = 0; note 8
VSIZEVGA
vertical size with VGA overscan register VSIZE = 0;
−
70
−
%
(referenced to nominal vertical register VGAIN = 63;
size)
bit VOVSCN = 1; note 8
register VSIZE = 127;
register VGAIN = 63;
bit VOVSCN = 1; note 8
115.9 116.8 117.7 %
VSMODEHT
EHT compensation on vertical
size via VSMOD (pin 21)
(referenced to 100% vertical
size)
Ii(VSMOD) = 0
Ii(VSMOD) = −120 µA
−
0
−
%
−
−7
−
%
Ii(VSMOD)
input current (pin 21)
VSMOD = 0
VSMOD = −7%
−
0
−
µA
−
−120 −
µA
Ri(VSMOD)
Vref(VSMOD)
input resistance
reference voltage at input
300 −
−
5.0
500 Ω
−
V
2003 Sep 30
20
Share Link: 